
Od kiedy w historii artylerii pojawiło się strzelanie spoza wzgórz, powstał problem takiego umieszczenia punktów obserwacyjnych, aby miały nieprzerwany ogląd przedpola. Dotąd sprawa była prosta, dowódca stał obok armat i kierował ich ogniem. Kiedy jednak działa zostały odsunięte od pierwszej linii i schowane za wzgórzami, kierowanie ogniem znacznie się skomplikowało.
Przeciwnik, co zrozumiałe, także starał się ukryć przed obserwacją. Punty obserwacyjne artylerii zaczynały być umieszczane coraz wyżej, aż w końcu w ich roli znalazły się najpierw samoloty, a później śmigłowce. Statki powietrzne miały jedną zasadniczą wadę – na ich pokładzie znajdował się człowiek, którego nie można było wysłać zbyt głęboko poza linię frontu, chociażby z uwagi na jego wartość jako źródła informacji. Dlatego też, kiedy pojawiły się bezzałogowe statki powietrzne, od razu znalazły się w polu zainteresowania artylerzystów. W niektórych krajach (np Francja) doszło do tego, że jednostki dronów zostały organizacyjnie podporządkowane artylerii.
Wydawałoby się, że oto uzyskaliśmy możliwość obserwacji przeciwnika wisząc mu dosłownie nad głową. Niestety, rozwiązanie jednego problemu, skutkuje powstaniem kolejnych. Głównym problemem przy kierowaniu ogniem artylerii z użyciem BSP (klasy mini), jest takie jego umieszczenie w powietrzu, aby znajdował się on jak najbliżej celu. „Jak najbliżej” oznacza także blisko przelatujących pocisków i wybuchów. Pojawia się pytanie, czy relatywnie niewielka maszyna nie zostanie strącona przez podmuch przelatującego pocisku lub co gorsza trafiona jednym z nich. Weryfikacja praktyczna wydaje się być niemożliwa, z jednej strony ze względu na koszty, takiego przedsięwzięcia, z drugiej ze względu na brak sprzętu, który do takich testów mógłby zostać wydzielony. Trzeci problem to oczujnikowanie platformy, żeby wiadomym było jak daleko od niego przelatywały pociski, a nie tylko czy zostanie ona strącona. Rozwiązaniem okazała się być symulacja taktyczna, przeprowadzona w oparciu o program Virtual Battlespace 2(VBS2).
Na początek nieco o samym programie. Nie jest to symulator, do jakiego jesteśmy przyzwyczajeni, ponieważ nie jest to symulator jednego rodzaju sprzętu. Jest to raczej środowisko symulacyjne, w którym odwzorowany jest zarówno sprzęt wojskowy, jak również poszczególni żołnierze, czy oddziały.
W VBS2 możemy sterować każdym rodzajem sprzętu, znajdującym się w bibliotece, czyli jednym z ok. 6000 obiektów. Jeśli liczba szkolonych jest mniejsza niż sił w scenariuszu, wykorzystuje się sterowanie przy pomocy sztucznej inteligencji. Za pomocą programu można szkolić żołnierzy-specjalistów lub też sztaby w trakcie ćwiczeń (poprzez przeniesienie sytuacji do symulacji, uruchomienie jej, przekazanie wyników do dalszej pracy oficerów).
System używany jest przez Wojska Lądowe i Korpus Piechoty Morskiej Stanów Zjednoczonych, Siły Zbrojne Australii, Siły Zbrojne Nowej Zelandii, Siły Zbrojne Czech, Siły Zbrojne Wielkiej Brytanii, Siły Zbrojne Francji. Stanowi standardowy system symulacji NATO na poziomie taktycznym i jest uzupełnieniem symulatorów JCATS i JTLS.
VBS2 standardowo zawiera modele bezzałogowych statków powietrznych, w tym min. Scan Eagle, Heron Watchkeeper, Pchela, Raven, Desert Hawk, Predator, Reaper, Global Hawk, Shadow.

Na zdjęciu powyżej bezzałogowe statki powietrzne reprezentowane w środowisku symulacyjnym VBS2.
Do przeprowadzenia eksperymentu wykorzystano standardową wersję VBS2 oraz specjalną nakładkę do szkolenia kierowania ogniem artylerii – VBS2 Fires. Całość eksperymentu została zapisana, a następnie odtwarzana w module omówienia (AAR – After Action Review).
Głównym celem było określenie prawdopodobieństwa przypadkowego trafienia pociskiem artyleryjskim w samolot bezzałogowy krążący nad celem podczas prowadzenia ognia. Celem dodatkowym było określenie najmniejszych odległości w jakiej pocisk znalazł się od samolotu.
Wykorzystano samolot Scan Eagle ze względu na to, że znajduje się on w polskich Wojskach Specjalnych oraz ma wymiary zbliżone do Orbitera (na wyposażeniu dywizjonu rozpoznania powietrznego). Tym samym wynik eksperymentu może być użyteczny dla obu tych jednostek.
Ostrzał prowadziła bateria złożona z sześciu ciągnionych dział kalibru 120 mm, który jest najbliższy kalibrowi dział samobieżnych 2S1 Goździk, podstawowego sprzętu artyleryjskiego WP. Nie przewidziano przemieszczania się armat, więc działa ciągnione były do przyjęcia.


W module VBS2 Fires zaprogramowano salwy ogniem szybkim na dwóch rodzajach ładunku. Pierwszy ładunek gwarantował niską trajektorię lotu pocisków, drugi trajektorię wysoką (wierzchołkowa toru lotu pocisków – ok 3400 m). Dzięki temu uzyskano zarówno dużą ilość pocisków jednorazowo przelatujących w okolicy samolotu oraz to, że ich trasy przetną płaszczyznę krążenia samolotu.

Na zdjęciu powyżej widoczny jest samolot ScanEagle, jego trasa lotu (niebieska linia) oraz trajektoria jednego z pocisków artyleryjskich (czerwone punkty).

Ostrzał prowadzony był na snopach: zbieżnym (zdjęcie powyżej) oraz dostosowanym do rozmiaru celu (okrąg – circular). Samolot został umieszczony na wysokości 500 stóp (150 m) nad ziemią, z zaprogramowanym zadaniem krążenia po okręgu o promieniu 200 m.
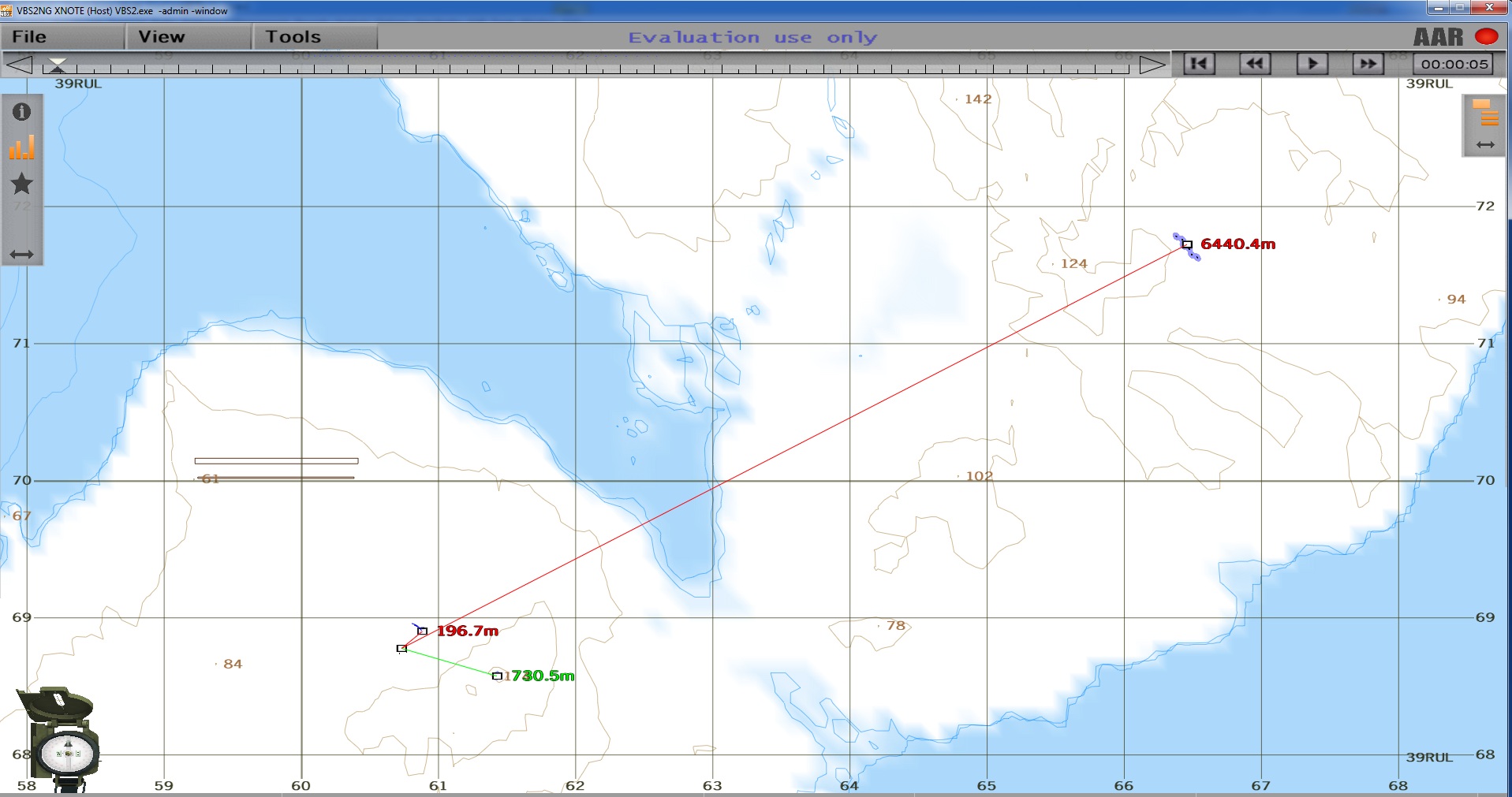
Ugrupowanie przedstawione jest na zdjęciu powyżej, wraz z odległościami poszczególnych elementów od celu. Z prawej strony bateria artylerii (6440,4 m). Na prawo od celu obserwator (730,5 m) oraz bezzałogowiec (196,7 m).

Celem było pięć wraków BWP-1 (zdjęcie powyżej)
Wystrzelonych zostało 1000 pocisków. Jeżeli wziąć pod uwagę koszt eksperymentu wahający się w granicach 100 tys zł., to żeby przeprowadzić podobny eksperyment w rzeczywistości, pocisk artyleryjski musiałby kosztować 100 zł. A przecież jest to tylko jeden ze składników. Dodatkowo, z każdym wystrzelonym pociskiem koszty zwiększałby się. Tymczasem symulator pozwala na wystrzelenie dowolnej ilości amunicji.
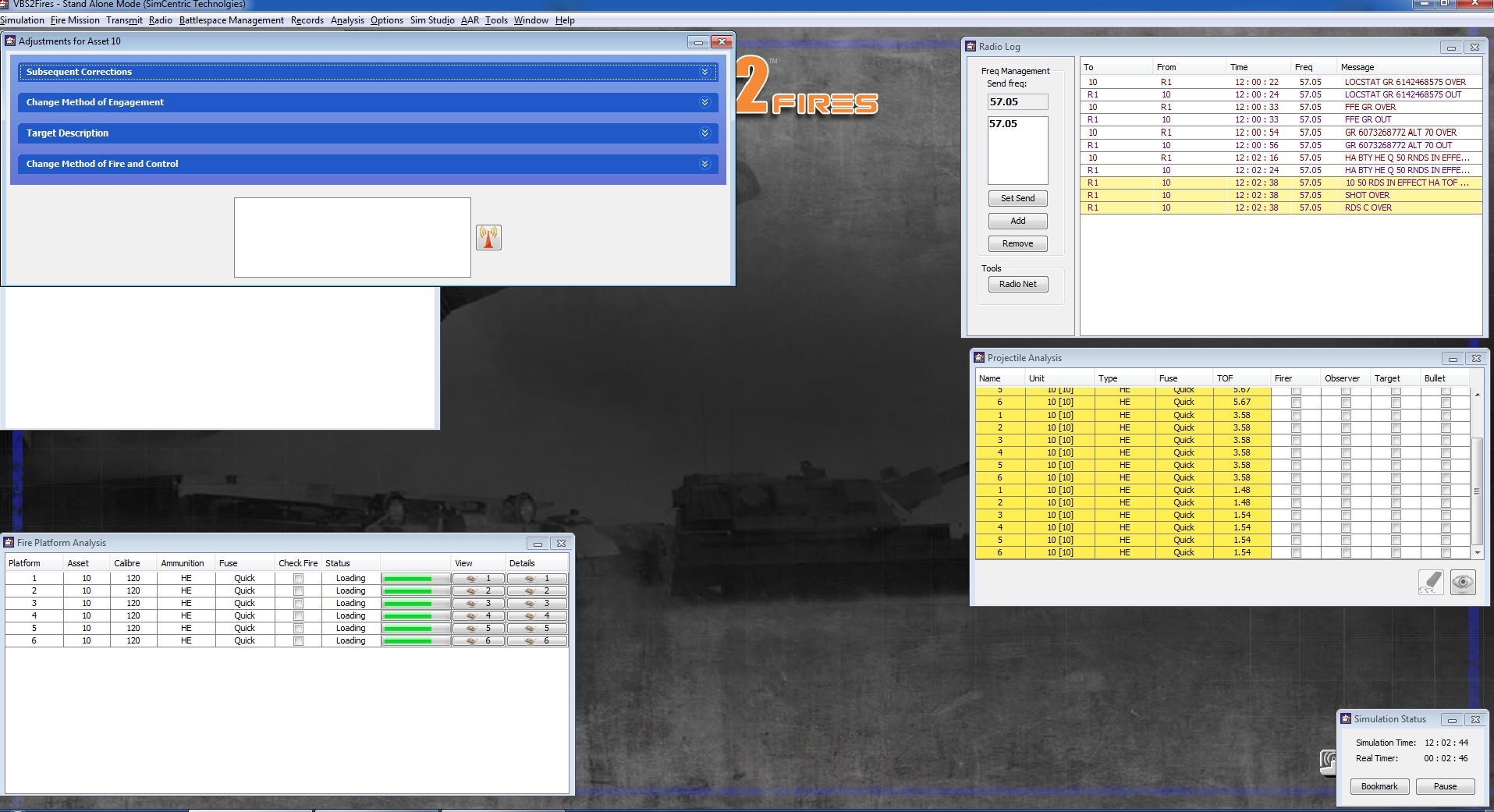
Kierowanie ogniem artylerii odbywało się z poziomu modułu VBS2 Fires, będącego narzędziem do szkolenia procedur wezwania ognia artylerii (Call for Fire). Na zdjęciu powyżej, widoczne niektóre z okien zarządzania programem. W lewym dolnym rogu widoczne okno informacji o poszczególnych działach, załadowanych pociskach, czynnościach obsługi (ładowanie). W prawym górnym rogu widoczne okno zapisu korespondencji radiowej. Po prawej na środku – okno informacji o wystrzelonych pociskach, z którego można płynnie przejść do podglądu strzelającego działa, obserwatora, celu, lecącego pocisku.
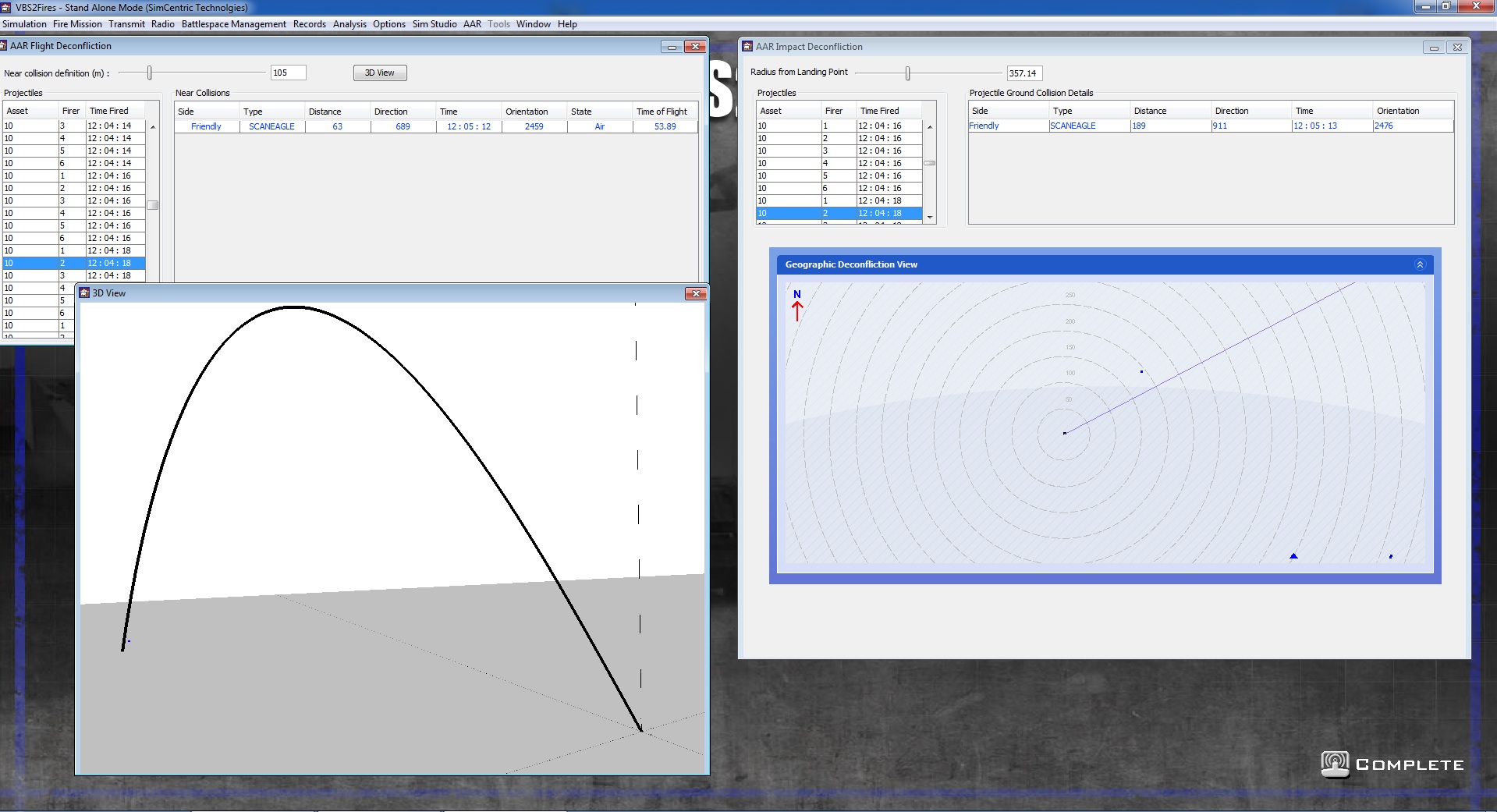
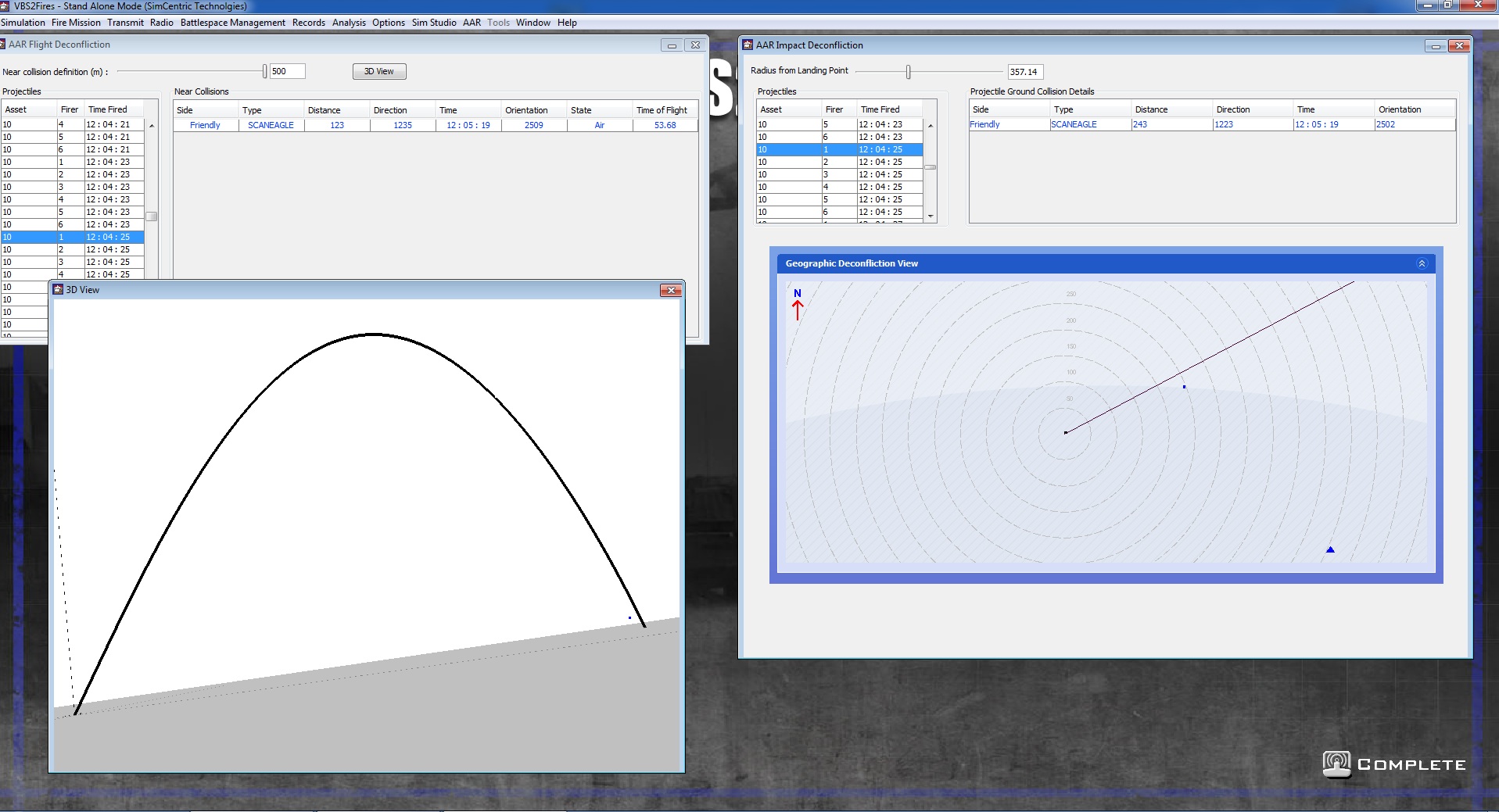
Dwa zdjęcia powyżej pokazują możliwości analizy programu VBS2 Fires. Po prawej stronie zdjęć widoczne okna analizy punktów upadku pocisków wraz z odległością do bezzałogowca. Okna po lewej stronie zdjęć pokazują trajektorię lotu wybranego pocisku oraz informację o nim (bateria, numer działa, odległość od latającego obiektu). Na zobrazowaniu graficznym trajektorii pocisku widoczny jest ScanEagle (mała niebieska kropka tuż przy punkcie upadku pocisku). Jak można zobaczyć jeden z pocisków przeleciał w odległości 63 m, a drugi w odległości 123 m od platformy ScanEagle.



Zdjęcia powyżej przedstawiają położenie samolotu ScanEagle i trajektorii pocisków w wizualizacji w programie VBS2.
Widok salwy lecącej w kierunku celu. Widoczne ułożenie snopu dostosowanego do kształtu celu (circular). Na zdjęciu poniżej widok salwy (snop zbieżny) z poziomu celu. W górnej części ekranu – trasa przelotu samolotu bezzałogowego (niebieska linia).

Portal bezzalogowce.pl składa podziękowanie firmie Specops Sp. z o.o. z Gdyni (wyłącznemu przedstawicielowi producenta programów VBS2 i VBS2 Fires na Polskę) za udostępnienie oprogramowania, modeli sprzętu oraz modułu After Action Review, do przeprowadzenia eksperymentu.